A self-balancing robot is a fascinating application of robotics that combines control systems and sensor technology to achieve remarkable stability on two wheels. These innovative machines are not just a testament to engineering prowess; they serve as an excellent introduction to concepts like PID tuning and robotics programming using platforms such as Arduino. At the heart of most self-balancing robots is the MPU6050 sensor, which plays a crucial role in monitoring the robot’s tilt and movement. With the right adjustments to the PID controller, enthusiasts can create balance robots that improve in performance, providing both a challenge and an opportunity to learn more about motor control. Whether you are a hobbyist or a professional, experimenting with self-balancing robots can lead to exciting new projects and deeper insights into the world of robotics.
Self-stabilizing machines, often referred to as balance bots or two-wheeled robots, have gained popularity among tech enthusiasts and learners alike. These devices leverage advanced control algorithms and sensors to maintain equilibrium while navigating various terrains. Project builders can utilize various components, including an MPU6050 sensor for precise orientation feedback and Arduino platforms for seamless coding interfacing. Mastering PID control in these creations not only enhances their functionality but also sharpens skills in robotics and programming. Engaging in such projects opens the door to a deeper understanding of robot control systems and the intricate dance of balancing technologies.
Understanding Self-Balancing Robots
Self-balancing robots represent a fascinating application of robotics and control theory. They utilize advanced robot control systems to achieve dynamic stability, working diligently to stay upright on two wheels. By combining the right sensors, such as the MPU6050, with microcontrollers like Arduino, these robots can effectively interpret their orientation and make real-time adjustments to maintain balance.
The heart of a self-balancing robot’s functionality lies in its ability to process data and execute commands rapidly. The MPU6050 sensor, which integrates both an accelerometer and a gyroscope, plays a crucial role by providing continuous readings of the robot’s tilt and angular velocity. Utilizing readily available components, hobbyists and educators can dive into Arduino projects centered around these innovative machines.
Frequently Asked Questions
What is a self-balancing robot and how does it work?
A self-balancing robot is a type of robot control system that maintains its upright position on two wheels without falling over. Utilizing the MPU6050 sensor, which integrates an accelerometer and gyroscope, the robot detects its tilt and motion. An Arduino processes this information through PID tuning to command motors, helping adjust their speed and direction for stability.
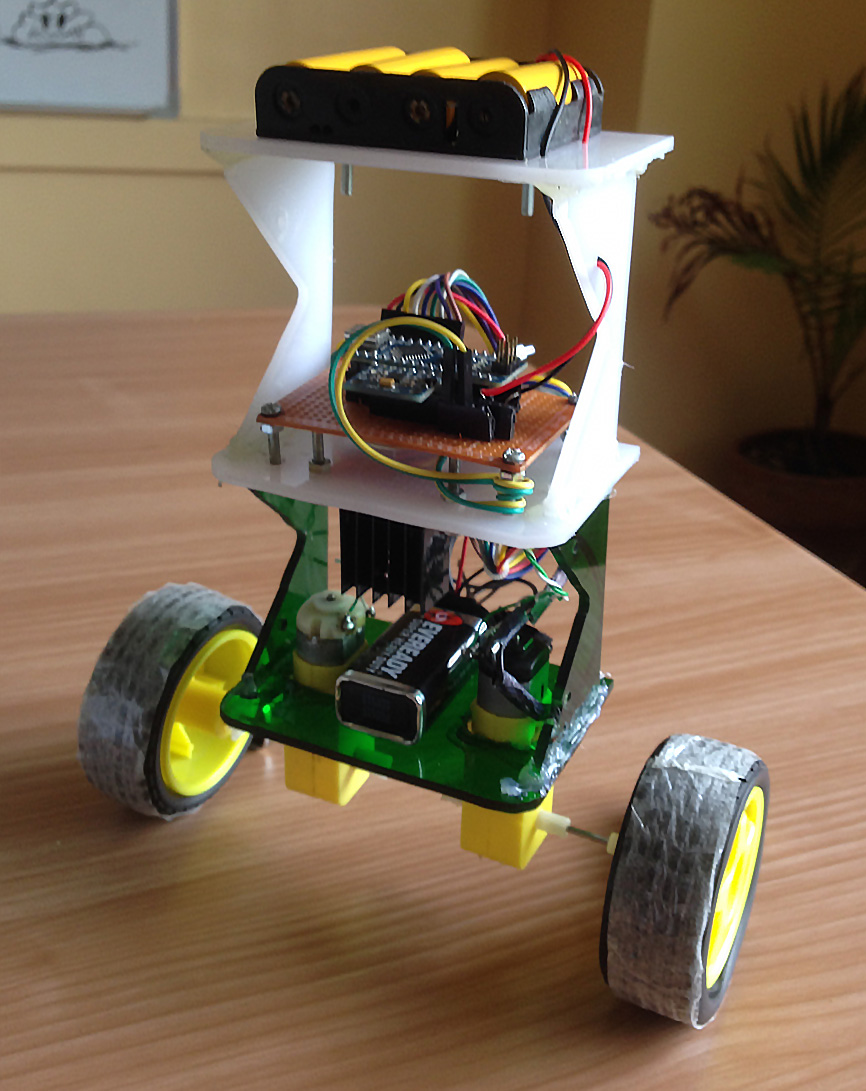
What components do I need to build a self-balancing robot?
To build a self-balancing robot, you will typically need an Arduino board, an MPU6050 sensor, an L298N motor driver, two DC motors, and a power source such as Li-ion batteries. These components work together to create a reliable balance robot capable of maintaining its upright posture.
How does PID tuning work in self-balancing robots?
PID tuning in self-balancing robots involves adjusting three parameters: Kp (proportional gain), Kd (derivative gain), and Ki (integral gain). Kp controls how quickly the motors respond to tilt, Kd reduces oscillations, and Ki corrects any slow drift. Finding the right balance of these values is crucial for maintaining stability.
What role does the MPU6050 sensor play in a self-balancing robot?
The MPU6050 sensor is vital in self-balancing robots as it measures tilt and movement. It provides real-time data on the robot’s orientation, which is processed by the Arduino to inform the PID control system, enabling the robot to adjust its actions to stay balanced.
Can I use Arduino projects to create a self-balancing robot?
Yes, Arduino projects are commonly used to create self-balancing robots. The Arduino board allows for programming the PID control system and processing data from the MPU6050 sensor, making it an ideal platform for building and experimenting with balance robots.
What are the challenges in tuning a self-balancing robot?
Tuning a self-balancing robot can be challenging, particularly in setting the PID parameters accurately. Incorrectly set gains can lead to instability, causing the robot to tilt too much or oscillate. The calibration of the MPU6050 sensor is also crucial, as each unit has unique offsets that need to be considered.
What educational benefits come from building a self-balancing robot?
Building a self-balancing robot provides hands-on experience in robot control systems, programming, and sensor fusion. It enhances skills in electronics, coding with Arduino, and understanding PID tuning, making it a fantastic project for learning and applying theoretical concepts in robotics.
What can I do with a self-balancing robot after I build it?
Once built, you can explore various applications with your self-balancing robot, such as using it as a rideable device, modifying its design for enhanced stability or speed, or even competing with other balancing robots. It serves as a great platform for further experimentation in robotics and control systems.
| Key Component | Function | Role in Self-Balancing Robot |
|---|---|---|
| MPU6050 | Measures tilt and movement | Provides real-time data to maintain balance through sensor fusion. |
| Arduino Uno | Processes sensor data | Runs PID control loop to adjust motor commands. |
| L298N motor driver | Controls motor speed and direction | Drives the DC motors based on PID output. |
| Li-ion batteries | Power supply for the system | Maintains operation and stability during balancing. |
| PID controller | Tuning system for balance | Adjusts motor response to achieve stability. |
Summary
A self-balancing robot is an impressive application of control systems and embedded programming. By leveraging the MPU6050 sensor and an Arduino, these robots exemplify the balance of physics through advanced PID control. As enthusiasts and beginners explore this fascinating project, it not only serves as a gateway into robotics but also enhances one’s understanding of sensor fusion and real-time data processing. Whether for entertainment or educational purposes, creating a self-balancing robot remains a rewarding endeavor.


